Los sistemas de actuadores son los elementos de los
sistemas de control que transforman la salida de un
microprocesador o un sistema de control en una acción de
control para una máquina o dispositivo.
Sistemas neumáticos e hidráulicos
Con frecuencia las señales neumáticas son
utilizadas para controlar elementos de actuación final, incluso cuando el
sistema de control es eléctrico. Esto se debe a que con dichas señales es
posible accionar válvulas de grandes dimensiones y otros dispositivos de
control que requieren mucha potencia para mover cargas considerables. La
principal desventaja de los sistemas neumáticos es la compresibilidad del
aire. Las señales hidráulicas se usan en dispositivos de control de mucho
mayor potencia; sin embargo, son más costosas que los sistemas neumáticos y hay
riesgos asociados con fugas de aceite, que no existen en una fuga de aire.
Fuentes de energía
En un sistema hidráulico la
presurización del aceite se logra mediante una bomba accionada por un motor
eléctrico. La válvula de alivio libera presión cuando ésta rebasa determinado
nivel de seguridad; la válvula de retención evita que el aceite regrese a la
bomba y el acumulador equilibra las fluctuaciones de corta duración en la
presión de salida del aceite. En esencia el acumulador es un recipiente que
mantiene el aceite bajo presión, soportando una fuerza extema.
 |
| Fuente de alimentación hidráulica |
En una fuente de energía neumática
se acciona un compresor de aire con un motor eléctrico. El aire que entra al
compresor se filtra y pasa por un silenciador para reducir el nivel de ruido.
La válvula de alivio de presión protege contra un aumento de la presión del
sistema que exceda el nivel de seguridad. Dado que el compresor aumenta la
temperatura del aire, es posible que sea necesario un sistema de enfriamiento;
para eliminar la contaminación y agua del aire se utiliza un filtro y un
separador de agua. En el receptor de aire se aumenta el volumen del aire del
sistema y se equilibran las fluctuaciones de presión de breve duración.
 |
| Fuente de alimentación neumática |
Válvulas para control de
dirección
En los sistemas neumáticos e
hidráulicos se utilizan válvulas de control de dirección para controlar el
sentido de flujo de un fluido que pasa por un sistema. Su función no es
modificar el gasto de un fluido, pero son dispositivos abiertos o cerrados por
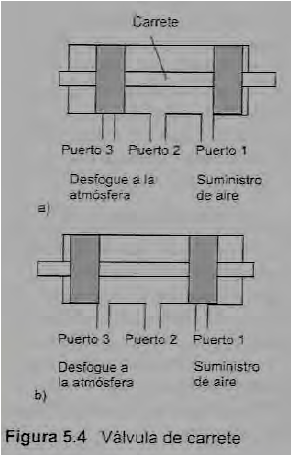
completo, es decir abierto/cerrado (on/off). Un tipo muy común de válvula de
control de dirección es la válvula de carrete. Dentro del cuerpo de la válvula
se desplaza un carrete en forma horizontal para controlar el flujo. Otra
modalidad muy común de válvula de control direccional es la válvula de vastago.
Símbolos de válvulas
Las diferentes posiciones de
conexión de las válvulas de control se representan mediante un cuadrado. La
siguiente imagen muestra ejemplos de algunos símbolos con los que se
representan los diversos modos en que actúan las válvulas. En el símbolo de una
válvula pueden presentarse uno o más de estos símbolos.
Válvulas operadas con pilotaje
La fuerza necesaria para accionar
la bola o desplazar la válvula en ocasiones es demasiado grande para hacerlo de
manera manual o mediante un solenoide. Para solucionar ese problema se utiliza
un sistema accionado con pilotaje, el cual usa una válvula para controlar una
segunda válvula. La capacidad de la válvula piloto es pequeña y se acciona en
forma manual o mediante un solenoide. Su función es permitir que la válvula
principal sea operada a través del sistema de presión.
Válvulas direccionales
El flujo sólo se realiza en la
dirección en la que la bola empuja al resorte. El flujo en la dirección opuesta
está bloqueado porque el resorte empuja la bola y ésta ocupa su asiento.
Válvulas de control de presión
Existen varios tipos de válvulas
de control de presión:
1. Válvulas para regulación de presión
2. Válvulas limitadoras depresión
3. Válvulas de secuencia depresión
Cilindros
El cilindro hidráulico o neumático
son ejemplos de actuadores lineales. Los principios y configuración son los mismos,
tanto para la versión hidráulica como para la neumática; las únicas diferencias
son el tamaño, debido a las mayores presiones que se utilizan en I versiones
hidráulicas. El cilindro consiste en un tubo cilindrico por el que se desplaza
un pistón/émbolo.
El término simple acción se
utiliza cuando la presión se aplica sólo en uno de los extremos del pistón; en
general se utiliza un resorte para oponerse al desplazamiento del pistón
anterior. En el cilindro de simple acción, cuando una corriente pasa por el
solenoide, la válvula cambia de posición y se aplica presión para desplazar el
pistón por el cilindro. Cuando se interrumpe la corriente que pasa por el
solenoide, la válvula vuelve a su posición inicial y se desfoga aire desde el
cilindro. En consecuencia, el resorte devuelve el pistón por el cilindro.
El término doble acción se utiliza
cuando se aplica presión de control a los dos lados de un pistón. La diferencia
de presión entre ambos produce el movimiento del pistón, el cual se desplaza
por el cilindro en alguna de las dos direcciones debido a las señales de alta
presión.
La selección del cilindro
dependerá de la fuerza y velocidad que se requieran para desplazar la carga.
Puesta en secuencia de cilindros
En muchos sistemas de control se
utilizan los cilindros neumáticose hidráulicos como elementos de actuación que
requieren una secuencia de extensiones y contracciones de dichos cilindros.
 |
| Sistema Secuencial |
Válvulas para el control de
procesos
Las válvulas para el control de
procesos permiten controlar el gasto de un fluido.
Una forma común para el control
del actuador neumático que se utiliza en las válvulas para control de procesos
es el actuador de diafragma, que en esencia consiste en un diafragma con la
señal de presión de entrada del controlador en un lado y en el otro, la
presión atmosférica; esta diferencia de presión se conoce como presión manométrica.
El diafragma está hecho de hule sujeto entre dos discos de acero. El efecto de
los cambios de la presión de entrada producen el desplazamiento de la parte
central del diafragma.
suponiendo que la compresión del
resorte es proporcional a la fuerza aplicada, es decir, F = kx, siendo k una
constante, entonces kx = PA y, por eso, el desplazamiento del vastago es
proporcional a la presión manométrica.
Dimensionamiento de válvulas de
control
El término dimensionamiento de
válvulas de control se refiere al procedimiento para calcular el tamaño
adecuado del cuerpo de una válvula.
Actuadores giratorios
Un cilindro lineal provisto de las
conexiones necesarias se usa para producir movimientos rotatorios con ángulos
de menos de 360°. Otra alternativa es el actuador semigiratorio, en el cual se
utiliza un alabe. La diferencia de presión entre ambos puertos hace girar el
alabe y el vastago, lo cual es una medida de la diferencia de presiones. Dependiendo
de éstas, el alabe gira en sentido de las manecillas del reloj o en sentido
contrario a éstas.
Para giros de más de 360° se
emplea un motor neumático. Un rotor exéntrico tiene ranuras que fuerzan el
desplazamiento hacia fuera de los alabes, empujando las paredes del cilindro a
causa de la rotación. Los alabes dividen la cámara en compartimentos separados
cuyo tamaño aumenta desde el puerto de entrada hasta el puerto de salida. El
aire que entra al compartimento ejerce una fuerza en uno de los alabes y
provoca así el giro del rotor. La dirección de rotación del motor se puede
invertir utilizando otro puerto de entrada.
Sistemas de actuación mecánica
Los mecanismos son dispositivos
que se pueden considerar convertidores de movimiento, en lanío transforman el
movimiento de una forma a otra.
Entre los elementos mecánicos
están los mecanismos de barras articuladas, levas, engranes, cremalleras,
cadenas, correas de transmisión, etcétera.
Muchos de los efectos que antes se
obtenían con el uso de mecanismos en la actualidad se logran mediante sistemas
de microprocesadores. No obstante, los mecanismos todavía son útiles en los
sistemas mecatrónicos.
El término cinemática se refiere
al estudio del movimiento sin tener en cuenta las fuerzas. Al analizar los movimientos
sin considerar las fuerzas o energías, se dice que se hace el análisis cinemático
de un mecanismo.
El movimiento de un cuerpo rígido
puede ser muy complejo y su descripción resulta difícil. Sin embargo, el
movimiento de un cuerpo rígido se puede considerar como la combinación de
movimientos de traslación y de rotación. Considerando tres dimensiones
espaciales, el movimiento de traslación seria un movimiento que se divide en
componentes que coinciden con uno o más de los tres ejes. La línea rotación
puede ser una rotación con componentes que giran alrededor de uno o más de los
ejes.
Los movimientos complejos pueden
ser una combinación de movimientos de traslación y de rotación.
Grados de libertad y de restricción
Un aspecto importante del diseño
de los elementos mecánicos es la orientación y disposición de elementos y
partes El número de grados de libertad es la cantidad necesaria de componentes
de movimiento para producir el movimiento correspondiente. Si una articulación
está limitada a desplazarse a lo largo de una línea sus grados de libertad de
traslación se reducen a uno.
Uno de los problemas más
importantes del diseño es reducir la cantidad de grados de libertad, lo cual
requiere un número y orientación idónea de las restricciones. las
restricciones de un cuerpo rígido se cumple la siguiente regla básica:
Carga
Los mecanismos son estructuras y,
por lo tanto, transmiten y soportan cargas. Para determinar las cargas que
soporta cierto elemento es necesario hacer un análisis.
Cadenas cinemáticas
Cuando se analizan los movimientos
de un mecanismo sin prestar atención a las fuerzas, dicho mecanismo puede
considerarse como un conjunto de articulaciones. Cada una de las parles del
mecanismo que se mueve en relación con oirás se denomina articulación. Esta no
tiene por fuerza que ser un cuerpo rígido, basta que sea un cuerpo resistente
capaz de transmitir la fuerza requerida sufriendo una deformación
despreciable. Al conjunto de piezas de eslabonamiento y de articulaciones se
conoce como cadena cinemática
La cadena de cuatro barras
Esta cadena consiste en cuatro
acoplamientos conectados entre sí de manera que producen cuatro piezas de
enlace, cada una de las cuales tiene la posibilidad de girar.
El mecanismo corredera eje de
levas
Este mecanismo consta de un eje de
levas, una biela y una corredera.En esta configuración el acoplamiento 3 está lijo,
es decir, no hay movimiento relativo entre el centro de rotación del eje de levas
y la cubierta en la que se desplaza el pistón.
Levas
Una leva es un cuerpo que gira u
oscila y, al hacerlo, transmite un movimiento alterno u oscilatorio a un
segundo cuerpo conocido como seguidor, con el cual está en contacto.
La leva necesaria para producir
determinado movimiento del seguidor dependerá de su forma y del tipo de
seguidor que se emplee.
La leva excéntrica es circular y
su centro de rotación está descentrado. La leva en forma de corazón produce un desplazamiento en el seguidor que
aumenta a velocidad constante con el tiempo, antes de disminuir a velocidad
constante con el tiempo, por lo que la velocidad del seguidor resulta uniforme.
La leva en forma de pera produce un movimiento del seguidor estacionario
durante casi media revolución de la leva y después asciende y desciende de
manera simétrica en cada una de las cuartas partes de revolución restantes.
Trenes de engranes
Los Trenes de engranes son
mecanismos muy utilizados para transferir y transformar el movimiento
rotacional. Se emplean cuando es necesario obtener un cambio en la velocidad, o
el par de rotación de un dispositivo que está girando. El movimiento rotacional
se transfiere de un eje a otro mediante un par de cilindros giratorio.
La
transferencia del movimiento entre los dos cilindros depende de la fuerza de
fricción entre las dos superficies en contacto. Para evitar el deslizamiento
en los dos cilindros, se añaden dientes de engranaje, con lo que se obtiene un
par de engranes endentados.
Los engranes transmiten el
movimiento rotacional entre ejes y entre ejes inclinados entre sí. A este tipo
de engrane se le conoce como engrane recto.
El término tren de engranes
compuesto se refiere a un tren de en granes cuando dos de ellos están montados
en un eje común.
Un tren de engranes simple, sea de
engranes de dientes rectos o helicoidales, o engranes cónicos, por lo general
está limitado a una relación de engranaje total de casi 10.
Las transmisiones por correa son
en esencia un par de cilindros giratorios, donde el movimiento de uno de los cilindros se
transfiere al otro mediante una correa. En las transmisiones por correa se
aprovecha la fricción que se crea entre las poleas montadas sobre los ejes y la
correa que rodea el arco de contacto, y de esta manera se transmite un par de
rotación.
Tipos de correa
1. Plana
El área transversal de esta correa
es rectangular.
2. Redonda
La sección transversal es circular
y se empica con poleas con ranura.
3. Banda en V
Las correas de banda en V o
correas trapezoidales se utilizan en poleas con ranura.
4. Correa dentada reguladora de tiempo
En las correas dentadas
reguladoras de tiempo se necesitan ruedas dentadas, en las que cada diente
encaje en las ranuras de las ruedas.
Cadenas
Para evitar deslizamientos se
utilizan cadenas, las cuales se traban en los dientes de los cilindros
rotacionales, lo que equivale a un par de engranes conectados.
Rueda dentada y trinquete
Las ruedas dentadas se utilizan para trabar un mecanismo cuando sostiene una carga. Este mecanismo consta de una rueda, denominada rueda dentada, con dientes en forma de sierra que se enganchan con un brazo denominado trinquete. Este está sujeto aun pivote y se mueve hacia arriba y hacia abajo para trabar la rueda. La forma de los dientes es tal que sólo permite la rotación en una dirección. El trinquete impide la rotación de la rueda dentada en el sentido de las manecillas del reloj y sólo puede hacerlo levantando el trinquete, el cual casi siempre se acciona con un resorte para garantizar que de manera automática quede trabado en los dientes de la rueda dentada.
En un malacate, que sirve para enrollar un cable en un tambor, se utilizaría un trinquete para impedir que el cable se desenrolle al levantar la palanca.
Chumaceras
Siempre que hay desplazamiento de
una superficie que está en contacto con otra, ya sea por rotación o deslizamiento,
las fuerzas de fricción producidas generan un calor que constituye un
desperdicio de energía y produce desgaste. La función de los cojinetes o chumaceras
es guiar el movimiento de una parte respecto de otra con mínima fricción y
máxima exactitud.
Cojinete de deslizamiento
Los cojinetes se usan para apoyar
ejes rotacionales que soportan carga en dirección radial.
Cojinetes de bola y de rodillo
Con este tipo de cojinetes, la
carga principal se transfiere del eje rotacional al apoyo mediante un contacto
de rodadura en vez de un contacto por deslizamiento.
Sistemas de actuación eléctrica
Al estudiar los sistemas
eléctricos que se emplean como actuadores
de control deberán tenerse en
cuenta los siguientes dispositivos y sistemas:
1. Dispositivos de conmutación, como son los interruptores mecánicos (relevadores) y los interruptores de estado sólido (diodos,
tiristores y transistores), en los que la señal de control enciende o apaga un
dispositivo eléctrico
2. Dispositivos tipo solenoide, en los cuales
una corriente que pasa por un solenoide acciona un núcleo de hierro dulce
3. Sistemas motrices, en los cuales la
corriente que pasa por el motor produce una rotación.
Interruptores mecánicos
Los interruptores
mecánicos son elementos que con frecuencia se usan como sensores para producir
y enviar entradas a diversos sistemas.
El relevador eléctrico es un
ejemplo de interruptor mecánico que en los sistemas de control se usa como
actuador.
Relevadores
El relevador eléctrico
responde a las señales de control mediante una sencilla acción de conmutación
de encendido/apagado (on/off); la figura ilustra el principio de funcionamiento
Los relevadores de retardo son
relevadores de control y su acción de conmutación se produce con un
retardo, que por lo general es ajustable y se inicia al pasar una corriente por
el devanado del revelador, o cuando deja de pasar por éste.
Interruptores de estado Sólido
Para realizar la conmutación
electrónica de los circuitos se utilizan diversos dispositivos de estado
sólido. Entre éstos figuran los siguientes:
1.
Diodos
2.
Tiristores y triacs
3.
Transistores bipolares
4.
MOSFETs de potencia
Diodos
un diodo, permite
el paso de una cantidad significativa de corriente sólo en una dirección. De
ahí que, el diodo se considera como un 'elemento direccional que permite el
paso de corriente sólo cuando su polarización es directa. Si el diodo tiene una
polarización inversa suficiente, es decir, un voltaje muy alto, causa una ruptura.
Tiristores y triacs
El tiristor o rectificador
controlado por silicio (SCR, por sus siglas en inglés), es un
diodo con una compuerta que controla las condiciones en las que se activa.
El triac (tiristor bidircccional)
es similar al tiristor y equivale a un
par de tiristores conectados de forma
inversa y en paralelo al mismo chip. El triac se activa tanto en sentido
directo como en sentido inverso; La ruptura en sentido directo ocurre
cuando el voltaje aumenta hasta el valor de ruptura; a partir de ese momento el
voltaje en el dispositivo permanece.
Cuando a un tiristor, o a un triac se
aplica voltaje de manera súbita, con la compuerta apagada, el
tiristor cambia su condición de desactivación a la de activación
Para evitar cambio brusco del voltaje de alimentación se controla la razón de cambio del voltaje con respecto al
tiempo; para ello se usa un circuito amortiguador o de frenado, el
cual consta de una resistencia conectada en serie con un capacitor que se
coloca en paralelo con el tiristor.
Transistores bipolares
Existen dos tipos de transistores
bipolares: el npn y el pnp.. En el transistor npn la corriente
principal entra por el colector y sale por el emisor y en la base se aplica una
señal de control. En el transistor pnp la corriente principal entra por el
emisor y sale por el colector y en la base se aplica una señal de control.
La combinación de un par
de transistores que permita la conmutación de un valor de corriente alto con
una entrada de corriente pequeña se conoce como par de Darlinglon, el
cual se puede obtener en dispositivos de un solo chip. Por lo general,
un diodo de protección se conecta en paralelo con el transistor de
potencia para evitar que el transistor se dañe durante su desconexión,
Cuando se utilizan actuadores
controlados por transistor con un microprocesador, hay que prestar atención a la
magnitud de la corriente de base requerida y a su dirección.
La conmutación de un
transistor bipolar se realiza mediante corrientes de base, por lo que existe
la posibilidad de utilizar frecuencias de conmutación mayores que en los
tiristores. Su capacidad de manejo de potencia es menor que la de los
tiristores.
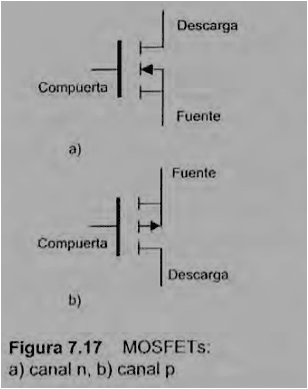
MOSFETs
Hay dos tipos de MOSFETs (transistores
de efecto de campo de semiconductor de óxido
metálico, por sus siglas en inglés): de canal n y de canal p; La principal
diferencia en el uso de un MOSFET para conmutación
y un transistor bipolar para el mismo propósito es que no entra corriente a la
compuerta para lograr dicho control. El voltaje de compuerta es la señal
consoladora. Por lo tanto, los circuitos de excitación se simplifican dado que
no es necesario ocuparse de la magnitud de la corriente.
Solenoidos
Los solenoides se pueden usar como
afinadores operados eléctricamente. Las válvulas de
solenoide son un ejemplo de estos dispositivos y se utilizan para
controlar el flujo de fluidos en sistemas hidráulicos o neumáticos Cuando una
corriente pasa por el devanado, un núcleo de hierro dulce es atraído hacia
dicho devanado y, al hacerlo, abre o cierra puertos que controlan el flujo de
un fluido.
Motores de cd
Los motores eléctricos con
frecuencia se emplean como elemento de control final en los sistemas de control
por posición o de velocidad, Los motores se pueden clasificar en dos categorías
principales: motores de cd y
motores de ca. La mayoría de los motores que se emplean en los
sistemas de control modernos son motores de cd. Los principios básicos del
funcionamiento de un motor son los siguientes:
1.
Cuando en un campo magnético, una corriente pasa por un conductor
se ejerce una fuerza sobre el conductor
2.
Cuando un conductor
se desplaza dentro de un campo magnético, sobre él se induce una f.e.m.
Principios básicos
En un motor de cd convencional, los
devanados de alambre se montan en las ranuras de un cilindro de material magnético
conocido como armadura. La armadura está montada en cojinetes y puede girar.
Esta se monta en el campo magnético producido por los polos de campo que
pueden ser, en pequeños motores, por ejemplo, imanes permanentes o
electroimanes, cuyo magnetismo se obtiene mediante una corriente que circula
por los devanados de campo .
Motores de cd con devanados de
campo
Los motores de cd con devanados de campo
se dividen en: motores en serie, en paralelo, compuestos y de excitación
independiente, de pendiendo de
la manera como se encuentran conectados los devanado de campo y los devanados
de la armadura (
1.
Motor (con excitación) en serie
En el motor en serie, los devanados de
la armadura y de los campos están en serie. Este motor produce el par
de rotación de arranque de mayor intensidad y alcanza la mayor velocidad sin
carga
2.
Motor en derivación (en paralelo)
En éste, los
devanados de armadura y de campo están en paralelo; genera el par de rotación
de menor intensidad, en el arranque tiene una velocidad sin carga mucho menor y
permite una buena regulación de la velocidad.
3.
Motor de excitación compuesta
Este motor tiene dos devanados de campo,
uno en serie con la armadura y otro en paralelo. En estos motores se intenta
conjuntar lo mejor del motor (excitado) en serie y del motor en paralelo, es
decir, un par de rotación de inicio de valor elevado y una
buena regulación de la velocidad.
4.
Motor de excitación independiente
En este motor el control de las
corrientes de armadura y de campo es independiente y se le puede considerar
como un caso especial del motor en paralelo.
La elección del motor dependerá de sus
aplicaciones.
Control de motores de cd
La velocidad que alcanza un motor de imán permanente
depende de la magnitud de la corriente que pasa por el devanado de la armadura.
Motores de cd de imán permanente
y sin escobillas
Un problema de los motores de cd es que
requieren un colector y escobillas para invertir en forma periódica la
corriente que pasa por cada uno de los devanados de la armadura. Las escobillas
establecen contacto deslizante con el colector; las chispas que saltan entre
ambos van desgastando las escobillas. Por ello, éstas deben ser reemplazadas
de manera periódica y volver a recubrir el colector. Para evitar estos
problemas se diseñaron los motores sin escobillas.
En esencia, estos motores constan de una
secuencia de devanados de estator y un rotor de imán
permanente..Un conductor por el que pasa corriente eléctrica y se encuentra en
medio de un campo magnético experimenta una fuerza; asimismo, como consecuencia
de la tercera ley del movimiento de Newton, el imán también experimenta una
fuerza opuesta de igual magnitud. En el motor de cd convencional, el imán está
fijo y los conductores por los que pasa la corriente presentan movimiento. En
el motor de cd de imán permanente y sin escobillas sucede lo contrario.
Los motores de cd de imán permanente
y sin escobillas se utilizan cada vez más cuando a la par se necesita un alto
rendimiento, gran confiabilidad y poco mantenimiento.
Motores de ca
Los motores de corriente alterna se
pueden clasificar en dos grupos: monofásicos y
polifásicos, cada uno de los cuales se subdivide en motores de inducción y
motores síncronos.
El motor de inducción de una
fase y jaula de ardilla consta de un rotor tipo jaula de
ardilla, es decir, barras de cobre o aluminio insertas en las ranuras de los
aros de las extremidades para formar circuitos eléctricos completos.
El motor
de inducción trifásico es similar al
motor de inducción de una fase, sólo que tiene un estator con tres devanados
separados 120°, cada uno conectado a una de las tres líneas de alimentación
eléctrica. Como estas tres fases alcanzan sus corrientes máximas en diferentes
momentos, se puede considerar que el campo magnético gira en torno a los polos
del estator, completando una rotación durante un ciclo completo de la
corriente. La rotación del campo es mucho más suave que en el motor monofásico.
El motor trifásico tiene la gran ventaja sobre el monofásico de tener arranque
automático. La dirección de rotación se invierte intercambiando alguna de las
dos líneas de conexión, lo que provoca el cambio de la dirección de rotación
del campo magnético.
Los motores síncronos tienen
estatores similares a los descritos en los motores de inducción, pero el rotor
es un imán permanente.
Los motores de ca tienen la gran ventaja
respecto de los motores de cd de ser más baratos,
robustos, confiables y no necesitar mantenimiento. Sin embargo, el control de
la velocidad es más complejo que en los motores de cd y. en consecuencia, un
motor de cd con control de velocidad en general es más barato que uno de ca
con control de velocidad.
Motores paso a paso
El motor paso a paso es un
dispositivo que produce una rotación en ángulos iguales, denominados pasos,
por cada impulso digital que llega a su entrada. Existen diversos tipos de
motor paso a paso:
1.
Motor paso a paso de reluctancia variable
2.
Motor paso a paso de imán permanente
3. Motor paso o paso híbrido
Especificaciones del motor paso a
paso
Los siguientes son algunos de los términos más
utilizados para especificar motores paso a paso:
1.
Fase
Este término se
reliere a la cantidad de devanados independientes del estator
2.
Ángulo de paso
Se trata del ángulo que
gira el rotor durante un cambio de estado en los devanados del estator.
3.
Par de retención
Es el máximo par de
rotación que se puede aplicar a un motor energizado sin modificar su posición
de reposo y provocar la rotación del eje.
4.
Par máximo de enganche
Es el par de rotación máxima con
el que puede arrancar un motor, dada una frecuencia de pulsos, y lograr la
sincronización sin perder un paso.
5.
Par máximo de desenganche
Es el par de rotación máximo que
es posible aplicar a un motor, trabajando a determinada frecuencia de pasos,
sin perder su sincronización.
6.
Frecuencia de enganche
Es la frecuencia de conmutación máxima a
la que un motor cargado puede arrancar sin perder un paso.
7.
Frecuencia de desenganche
Es la frecuencia de conmutación en la que
un motor cargado puede mantener su sincronía conforme se reduce la frecuencia
de conmutación.
8.
Velocidad de progresión
Es el rango de frecuencias de conmutación entre el
enganche y el desenganche con el cual el motor funciona en sincronía, pero no
puede ni arrancar ni invertir su giro.
Control de un motor paso a paso
Para conmutar la alimentación eléctrica
de cd entre los pares de devanados del estator se utiliza electrónica de
estado sólido.
Los motores bifásicos se
denominan unipolares cuando tienen seis cables de conexión para generar
la secuencia de conmutación
Los motores de paso se usan para producir
pasos de rotación controlados, así como una rotación
continua, controlando su velocidad de rotación mediante la frecuencia de
aplicación de los pulsos que provocan el avance paso a paso.
Los motores bifásicos se denominan unipolares
cuando tienen tienen seis cables de
conexión para generar la secuencia de conmutación
Los motores
de paso se usan para producir pasos de rotación
controlados, así como una rotación continua, controlando su velocidad de
rotación mediante la frecuencia de aplicación de los pulsos que provocan el
avance paso a paso.